Pinza con mecanismos
de rigidez variable para la manipulación de productos delicados
Resumen:
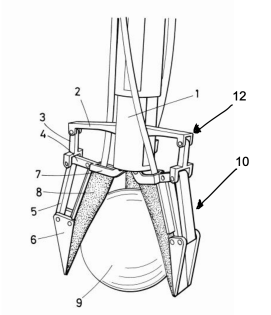
El proyecto CARICIA pretende
desarrollar una pinza robótica basada en una combinación de dedos
articulados subactuados con una zona de contacto blando basada en
vacío, con el fin de conseguir un manipulador versátil y eficaz para
productos delicados, como frutas y verduras u otros. Se dispone ya
de un prototipo resultante de un proyecto anterior, pero su diseño y
fabricación requiere de mejoras para su posible aplicación
industrial efectiva. Se han iniciado las primeras fases para la
protección industrial del concepto de diseño. Se plantea como
objetivo mejorar el nivel de madurez tecnológica del producto
pasando desde un nivel cercano a TRL3 o TRL4 hasta un TRL6, mediante
la creación de un prototipo para la demostración de funcionamiento
en un entorno relevante, similar al real. Para ello se plantean
actividades de diseño y prototipado, con vistas a la mejora
tecnológica del producto. Además se incluyen acciones dirigidas al
incremento de la relación con los sectores industriales de
aplicación y los de implantación de tecnología robótica, incluyendo
asesoramiento o mentoría tecnológica. En paralelo, se realizarán
estudios de mercado para valorar la posible comercialización del
producto, así como formación en materia de emprendimiento y creación
de empresas de base tecnológica. Al final del proyecto se espera
disponer de un prototipo demostrador de la nueva pinza en un entorno
relevante que pueda usarse para facilitar la transferencia del
producto al sector industrial.
Fechas:
Dic.
2021-Dic. 2023
IP UJI:
Antonio Pérez
González
Antonio Morales Escrig
Participantes:
UJI
Financia:
Ministerio de
Economía, Industria y Competitividad
(PDC2021-121011-I00)