Variable-stiffness
gripper for handling delicate products
Abstract:
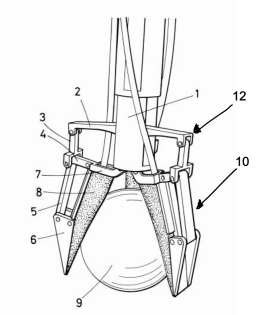
The project goal is
to develop a robotic gripper based on a combination of
under-actuated articulated fingers with a vacuum-based soft contact
zone, in order to achieve a versatile and effective manipulator for
delicate products, such as fruits and vegetables or others. A
prototype resulting from a previous project is already available,
but its design and manufacture requires improvements for its
effective industrial application. The first phases for the
industrial protection of the design concept have already been
started. The present proof of concept project has the aim of
improving the level of technological maturity of the product, going
from a Technology Readiness Level (TRL) close to 3 or 4 up to 6,
with the development of a prototype to demonstrate the operation in
a relevant environment, similar to the real one. For this, we
propose design and prototyping activities, with a view to the
technological improvement of the product. Moreover, actions oriented
to the increase of the relationships with the industrial sectors of
application and those devoted to implementation of robotic
technology, including technological mentoring activities are also
planned. In parallel, market studies will be carried out to assess
the possible commercialization of the product, as well as training
in entrepreneurship and creation of spin-off companies. At the end
of the project it is expected to have a demonstration prototype of
the new gripper in a relevant environment that can be used to
facilitate the transfer of the product to the industrial sector.
Date:
Dec.
2021-Dec. 2023
PI UJI:
Antonio Pérez
González
Antonio Morales Escrig
Partners:
UJI
Funding:
Spanish Ministry of
Economy, Industry and Competitiveness
(PDC2021-121011-I00)